Deprecated in Current Release
| Requirements | Software operation | Defining Calibration Tasks | Definitions and Theory |
|---|---|---|---|
The Required Evidence documentation describes what is necessary for calibration. The descriptions there outline what is required for Imatest to provide good calibration parameters for any device or system of devices.
This page describes how to design a test setup (physical target and capture positions) so that you can capture the required evidence for your specific device or system of devices, and to your required degree of precision.
For many devices, designing an appropriate test setup is the most significant and challenging part of calibration. Extremely wide field of view devices, test setup spatial constraints, and demanding precision requirements are all common challenges in this respect.
It is highly recommended that you consult with us on test setup design.
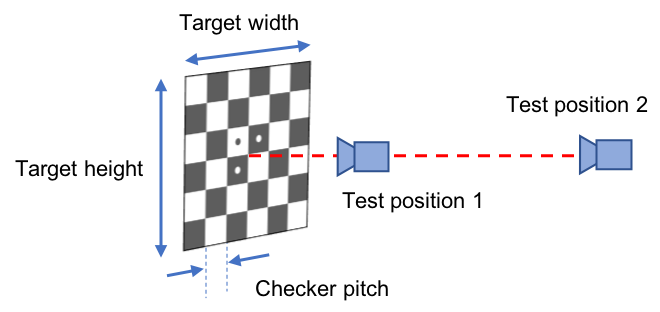
Figure 1, test setup configuration parameters (simplified positioning scheme). All values to be supplied in physical units, e.g. cm.
Target Selection
As the Geometric Calibrator module currently only supports checkerboard targets, there are only two main design parameters to consider: checker pitch and target size.
Both of these parameters combine to form the total number of target points available (though, generally, not all points on the target will be visible in all test images, depending on field of view and test position). In general more checker points are better, though having thousands of checkers or more may affect runtime, depending on computer performance.
Checker pitch
Considerations on physical checker size. They should be:
- small enough that there is fine spatial sampling over the image space for distortion estimation and a large number of points in overlapping views of multi-cam systems
- large enough that they are distinguishable at the chosen test distances and detectable by the software
- large enough that the chart center fiducial circles are detectable by the software (>~6px in diameter, worst case)
In rare cases, depending on tested device characteristics, a checkerboard chart may be designed that has intentionally rectangular checkers.
Target size
In general, Imatest does not have a limit on how large a target should be (and thus on how many total points there are, within runtime considerations). More typically, the consideration comes from the other end: what is the minimum size of the target that we can get away with, given the checker size and test distances.
Considerations on total target size (width, height of checkerboard). It should be:
- Large enough to fill the field of view of each camera at at least one test position
- Small enough to fit in any space requirements
Both of the above design parameters are largely coupled with the selection of test positions and field of view of your device(s).
Test Position Selection
The following prescriptions are slightly simplified to talk about test distances, which are roughly assumed to be positions set back along the normal from the target plane, as opposed to arbitrary test positions. This is the typical setup for single cameras or systems which have largely parallel optical axes and overlapping fields of view.
Systems which break from this, e.g. those having devices facing in largely disparate directions, still should follow the general principles here, but also need to consider further angular requirements for their positions in order to provide evidence to calibrate all devices.
Range of test distances
The closest testing distance is typically required by the camera in your system with the widest field of view. Given the target size you have available, your closest distance should fill the required field of view of the widest-camera in order to map its distortion.
The farthest testing distance required is less clear and less critical. Most typically this is dictated by the longest hyperfocal distance of any device in the system, set so that the target is in-focus enough to accurately detect the feature points. (Note that this does not mean that the images need to be as sharp as possible- in fact a slight defocus can aid in sub-pixel detection of sharp feature points. Test Image definitions can also be tagged as needing special point-detection capabilities for blurry images far inside the hyperfocal distance.)
It is worth noting that capturing images as far from the target as possible does have the added benefit of effective focal length (EFL) estimation errors being smaller- any error in the estimated test distance will be proportionally smaller, and this is tightly coupled to EFL estimation.
Number of test distances
A minimal set of test distances (or positions) is one which fulfills the aforementioned requirements on filling various fields of view and having detectable (not too-blurry) targets.
Once you have determined this minimal set, it is often worthwhile to still add more capture positions. More evidence is always helpful for increasing the accuracy of parameter estimation, and may in fact be required to push the accuracy within the bounds of some specification requirement.
The relationship between the number of distances required and the resulting accuracy is also tightly coupled with the distance measurement error which can be supplied. If the accuracy of the nominal capture position location is within 100 microns, you may reach the same accuracy with two captures as a test setup that has accuracy of 1mm needs five captures for.