Deprecated in Current Release
| Requirements | Software operation | Defining Calibration Tasks | Definitions and Theory |
|---|---|---|---|
In the Geometric Calibrator, a Device System is a set of Devices (i.e., cameras) in some fixed configuration. This may include a stereo pair, many cameras in an array, or even just a single camera.
In the case of a single camera, a Device System must still be defined but it will trivially have only the single Device element and other properties may be ignored.
A rigid multi-camera system is sometimes called a multi-cam rig or just rig in the literature. See the Multi-Cam Model page for description of the mathematical model assumed in this module using the properties described here.
Geometric Calibrator requires that one device in the system be identified as the reference device. The camera center of the reference device is used as the origin of the whole system when determining system pose relative to world/target origin. The pose of other devices in the system are defined relative to the reference device, and thus their pose in world coordinates is generated by composition of the reference device’s pose and the other device’s relative-to-reference pose.
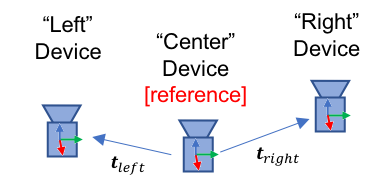
Figure 1, Device System definition components
Devices
Supported values: Sequence of Device definitions
An ordered list of Devices which comprise the system.
Reference Device
Supported values: index into sequence of Devices (above)
One device must be specified as a reference device- this is indicated by index value into the ordered list defined above.
Relative Positions
Supported values: 3-vector for each device
A set of translation vectors corresponding to each Device’s nominal position relative to the reference Device.
Note: Currently, it is assumed that the optical axes of the cameras in the system are nominally parallel. The actual rotation relative to reference can be estimated during calibration. Future versions will allow overriding of this assumption with an initial rotation matrix input.