Deprecated in Current Release
| Requirements | Software operation | Defining Calibration Tasks | Definitions and Theory |
|---|---|---|---|
A Device is synonymous with an individual camera- a lens and sensor together producing images. Typically the values supplied in this definition come from nominal device specs.
Geometric Calibrator requires some knowledge of the geometry of the sensor, which is necessary to provide a precise mapping from pixel array locations to precise physical locations on the sensor plane.
An initial estimate of a functional description of the lens is also required. These values, Effective Focal Length (EFL) and distortion model description, are used as a starting point for calibration optimization and estimated actual values for the device (as opposed to from spec) are returned by the calibration routine.
The relevant required parameters are illustrated in Figure 1, below.
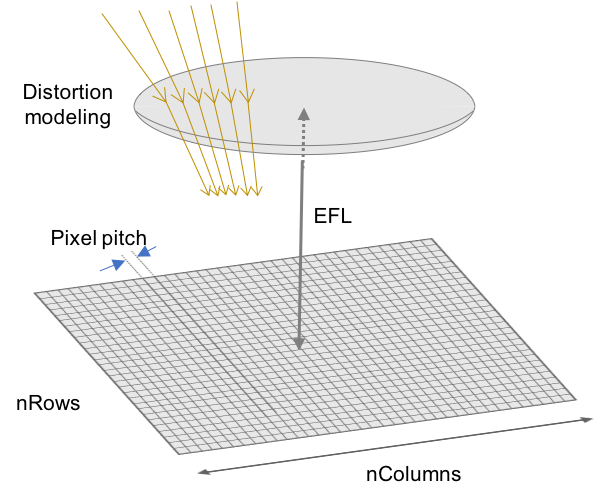
Figure 1, Illustration of required Device definition parameters
Sensor Size
Supported values: 2-array
Size of images produced by the device, [nRows, nColumns].
Note: Differently scaled or cropped images provided from a sensor require a different Device definition, in order to maintain a proper definition of spatial coordinates on the sensor plane. It is therefore essential that you provide here the size of the actual image format in which you will be providing images to the Geometric Calibrator later.
Pixel Pitch
Supported values: scalar value, with accompanying pixel pitch units property
The regular spacing between the pixel locations on the sensor, typically provided in microns.
Note: If a sensor has non-square pixels, supply one dimension’s pitch here and enable alpha estimation in the calibration- this will the estimation of the relative sampling rates (i.e., pitch) in each direction.
Lens Type
Supported values: RECTILINEAR or FISHEYE
This flag is a coarse classification which simply indicates to the software that it may need to work with images from this device specially (e.g. for target detection in images from devices with fisheye lenses). Default is RECTILINEAR.
EFL
Supported values: scalar value, with accompanying efl units property
The Effective Focal Length of the thin-lens approximation of the device optics, typically provided in mm.
This value is provided as an initial estimate and should be known from the lens component spec sheet. The actual EFL of the particular unit under test will be estimated.
Distortion Model
Supported values: a Distortion Model definition
An initial estimate of the distortion model describing the device’s optics and how they break with the rectilinear pinhole camera model. This is also used as a declaration of the distortion model to fit during calibration- the model type and number of parameters of the final calibration will match this initial input form.
Image Circle Radius
Supported values: non-negative value
Maximum distance from image array center to use for detecting target features. Useful for some fisheye lenses which produce an image only on a circular sub-region of the whole sensor. If not supplied, the whole area is used in any images from this device.