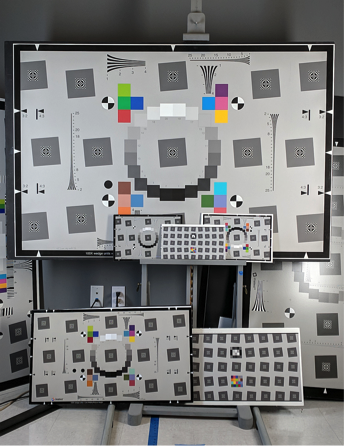
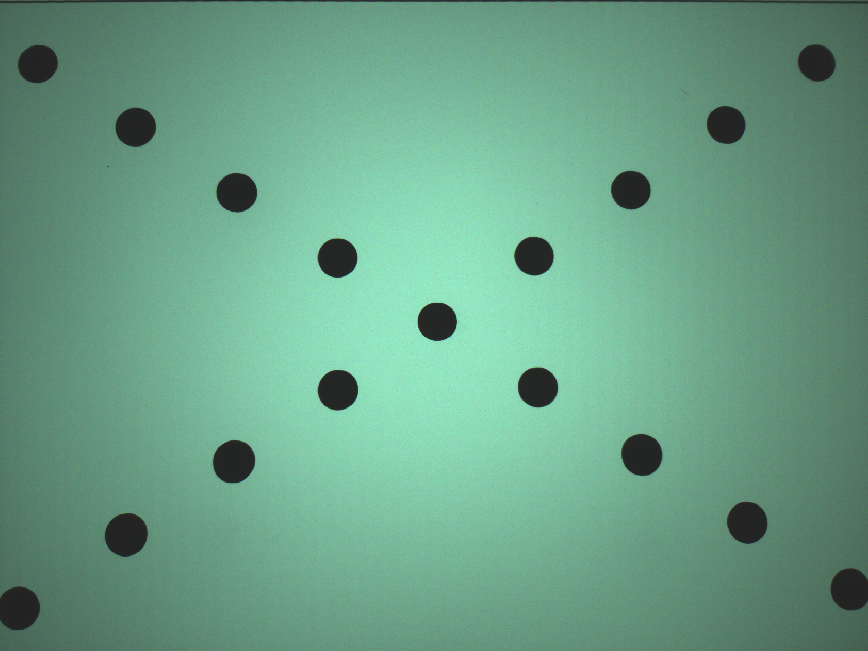
Veiling glare and Dynamic Range measurement from two images Presentation
Stray light (veiling glare) degrades image quality by fogging important details in darker areas, but it can be challenging to […]
Imatest Resolution Webinar
English Version English with Mandarin Translation Imatest Sharpness & Resolution Webinar 2022
Henry’s Imatest Training Links

Here are Henry’s favorite Imatest Links that he often mentions during the Imatest Training Class: Day 1 SSIM: Structural Similarity […]
Compensating MTF Measurements for Chart Quality Limitations
Camera MTF (sharpness) measurements are subject to a number of variations, some of which, like noise, are random and difficult […]
December 2018 Reading List

Our team has outlined a list of our favorite imaging resources that we use on the job here at Imatest. […]
Flare: ISO-18844 in the Visible and NIR
Last month, we posted Considerations when evaluating a Near Infrared camera. We reviewed important considerations for a NIR camera test […]
5 Common Pitfalls in Image Quality Testing
Having trouble with your Imatest test results? This article explains the five most common pitfalls in image quality testing, and […]